四轴无人机研究:第一回
无人机在现今社会的各个角落,都扮演着极其重要的作用。那么对于我们普通人而言,其最大的价值角色,就是航拍。鄙人的第一台机器,就是大疆的mini一代。带着他去了无数的地方,给我留下了很多珍贵的镜头。但是很不幸,两年的时间,已经飞不起来了。本着充分利用资源的原则,我想借其尸骨,来稍微深入的研究一下四旋翼无人机的飞行原理,然后尝试能否,借尸还魂。
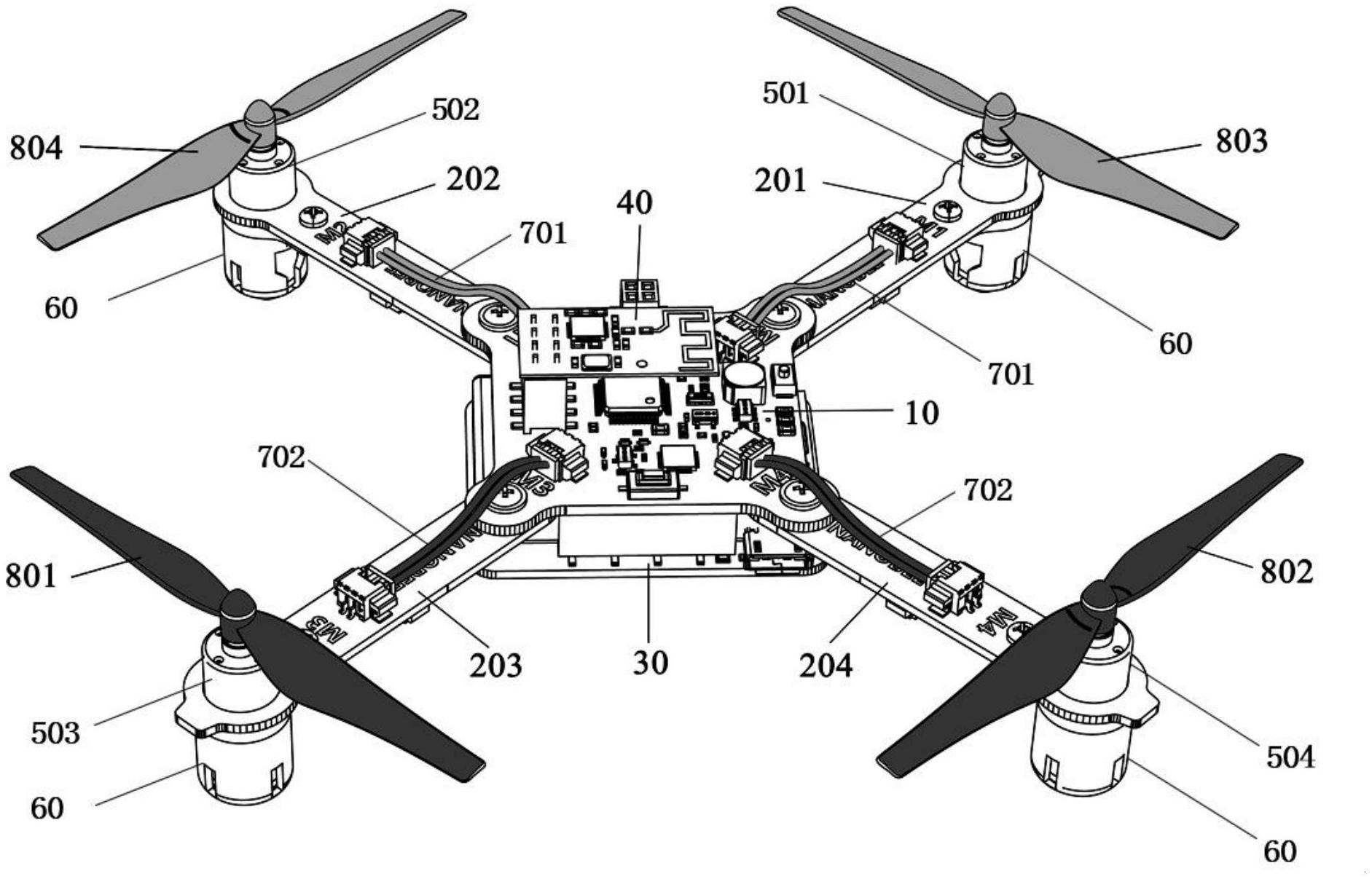
四旋翼无人机(Unmanned Aerial Vehicle, UAV)的大体构成
- 飞控系统(大脑)。 一块芯片。一般包括GPS记录经纬度的,气压计记录气压的、IMU惯性测量单元,计算三维空间中飞机姿态的各个参数的,指南针等。。。。
- 遥控系统。 就是手柄遥控器。遥控器发出信号,飞控的信号接收模块接收信号后,执行相应的指令。
- 动力系统。 电机(驱动浆叶),桨叶(提供升力),电池。
- 图传。 一小块芯片。搜集飞控返回的图像和其他飞行参数的各项信息。
- 机体框架。 一般机翼、机身,是无人机的主体部分,用来承载其他所有组件。
- 电调: 控制电机转速
基本流程: 操控手柄—信号给到接收机—>接收机给到飞控—>飞控给到对应的部件(电机)–> 完成飞行
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.