性能的考量:NMS过滤算法
本文将详细的介绍一个算法思路NMS。
详细的业务场景:
我们需要把后端返回的点数据,画到canvas中的大圆上。数据量较少的情况下比如几千个,那完全不需要用算法去做筛减。但是设想一下。后端返回了数万甚至是百万级别的点数据如何?在之前介绍浏览器图形化编程极限的时候,我们详细测试过,目下的谷歌浏览器,10000个图形绘制几近极限(注意,是需要支持拖拽缩放等操作时页面流畅的最大图形个数)。这个时候,我们就需要对点数据作筛减。
理由: 没必要显示那么多,同时目下浏览器也扛不住。
具体实现: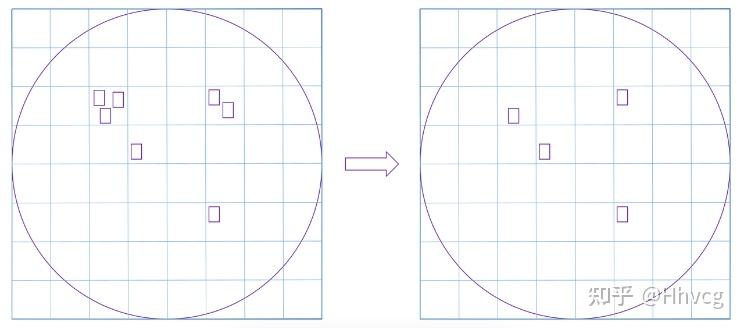
我们会给画布上图形个数,设定一个阈值K。将wh区域划分成一个个格子区域。为了最终限制在500,即wh / 500 = T,每个区域面积T中,最多输出1个。即可保证总输出的个数<= 500。
根据宽高数值,将画布按照一定的尺寸网格化,最后输出一个grid三维数组。分别表示行、列及各自一块区域内的所有缺陷得集合数组。
业务场景代码举例:
console.log('过滤前>>>', defects)
console.log('viewRange>>>', viewRange)
const maxNum = 400
if (defects.length <= maxNum) return defects
const seg_num = Math.sqrt(maxNum)
const seg_w = Math.max(Math.exp(-6),viewRange.width / seg_num)
const seg_h = Math.max(Math.exp(-6),viewRange.height / seg_num)
// const gridSize = Math.max(1, Math.floor(Math.sqrt(viewRange.width * viewRange.height / maxNum)))
console.log('seg_w>>', seg_w)
console.log('seg_h>>', seg_h)
console.log('每边的小格子数目>>', seg_num)
const [row, col] = [Math.ceil(seg_num), Math.ceil(seg_num)]
console.log('row>>', row)
console.log('col>>', col)
const grids = new Array(row).fill(0).map(() => new Array(col).fill(0).map(() => []))根据阈值的大小,计算出每边的格子数目。再根据宽高得出格子的宽高。然后生成一个三维的grid对象,分别代表行列及每个格子中的缺陷。上述代码初始化了grid。为了搜集每个格子中的缺陷,需要遍历得出:
const index = ([x, y]) => [Math.floor((x - viewRange.x) / seg_w) , Math.floor((y - viewRange.y) / seg_h)]
defects.forEach(defect => {
const [x, y] = index([defect.pos_x, defect.pos_y])
if (x < 0 || x >= row || y < 0 || y >= col) return
grids[x][y].push(defect)
})index函数的输入是该缺陷的坐标信息,输出该缺陷所隶属的格子x、y。最后塞入grid中。
至此,我们已经获得了我们想要的格子数组。下面要做的,就是遍历每一个格子,按照一定的规则去选择格子中的点—-filterDefects函数.
const result = []
for (let i = 0; i < row; i++) {
for (let j = 0; j < col; j++) {
result.push(...filterDefects(grids[i][j]))
}
}
return result注意这个filterDefects函数只会输出一个点。这样保证总输出数目最大就是我们设定的阈值数。关于如何选取,按照自己的思路。比如如果没有什么特别的需求,我就默认选择第一个元素作为输出即可。又比如我们优先选择某个特定缺陷类别。那就再做一个过滤。这种思路实现得NMS算法,很明显是区域优先。下一篇文章,我们呢会介绍另一种实现得思路:面积优先。
文毕。